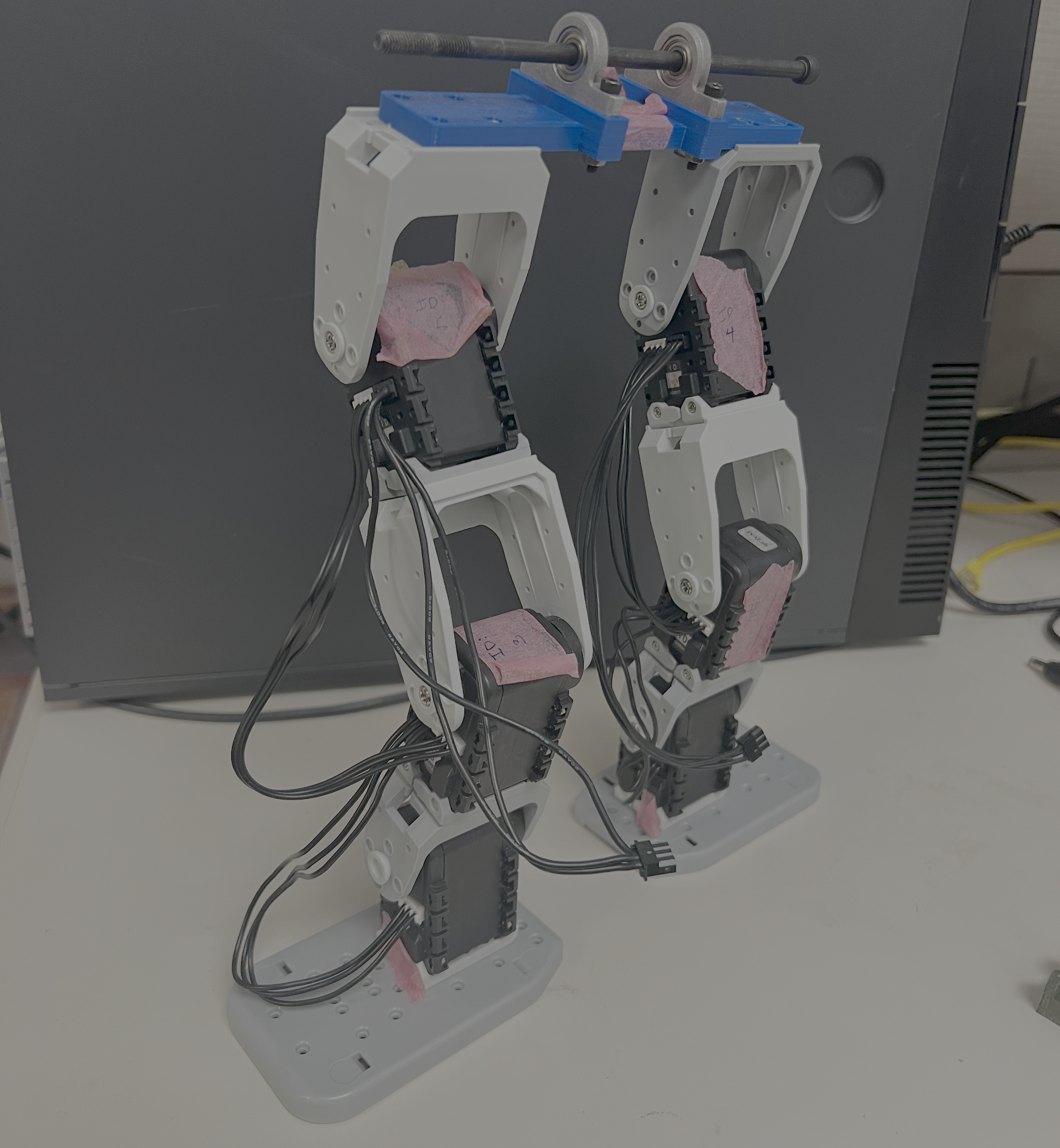
The biped thread involves coding your own class to control a statically stable planar biped robot. This thread covers forward kinematics, center of mass computation, and trajectory optimization.
The main documentation for this thread can be found here.