My research aims to develop and unify techniques from both
nonlinear control theory and machine learning
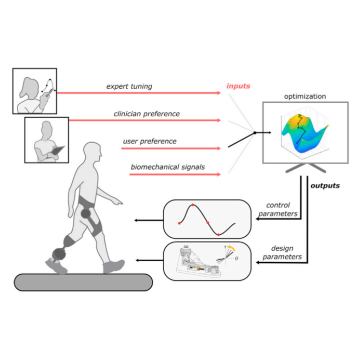
to systematically achieve stable and robust robotic-assisted locomotion. This includes developing efficient methods of user customization via human-robot interaction as well as studying the efficacy of assisted locomotion in clinical settings.

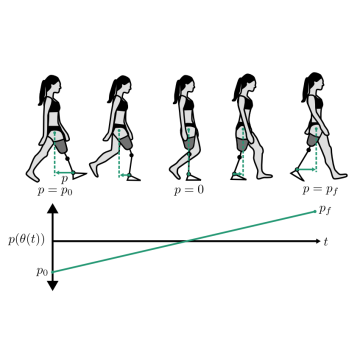
Locomotion
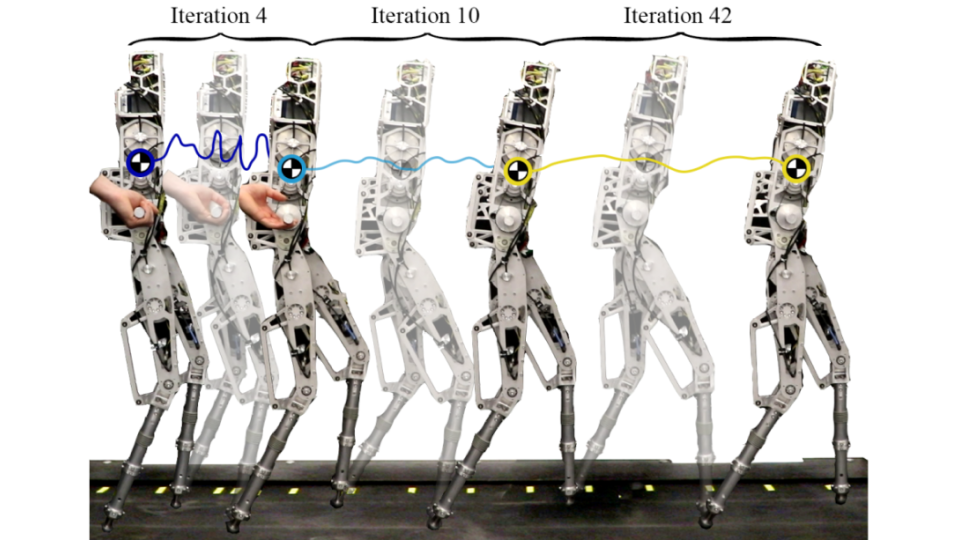
HRI

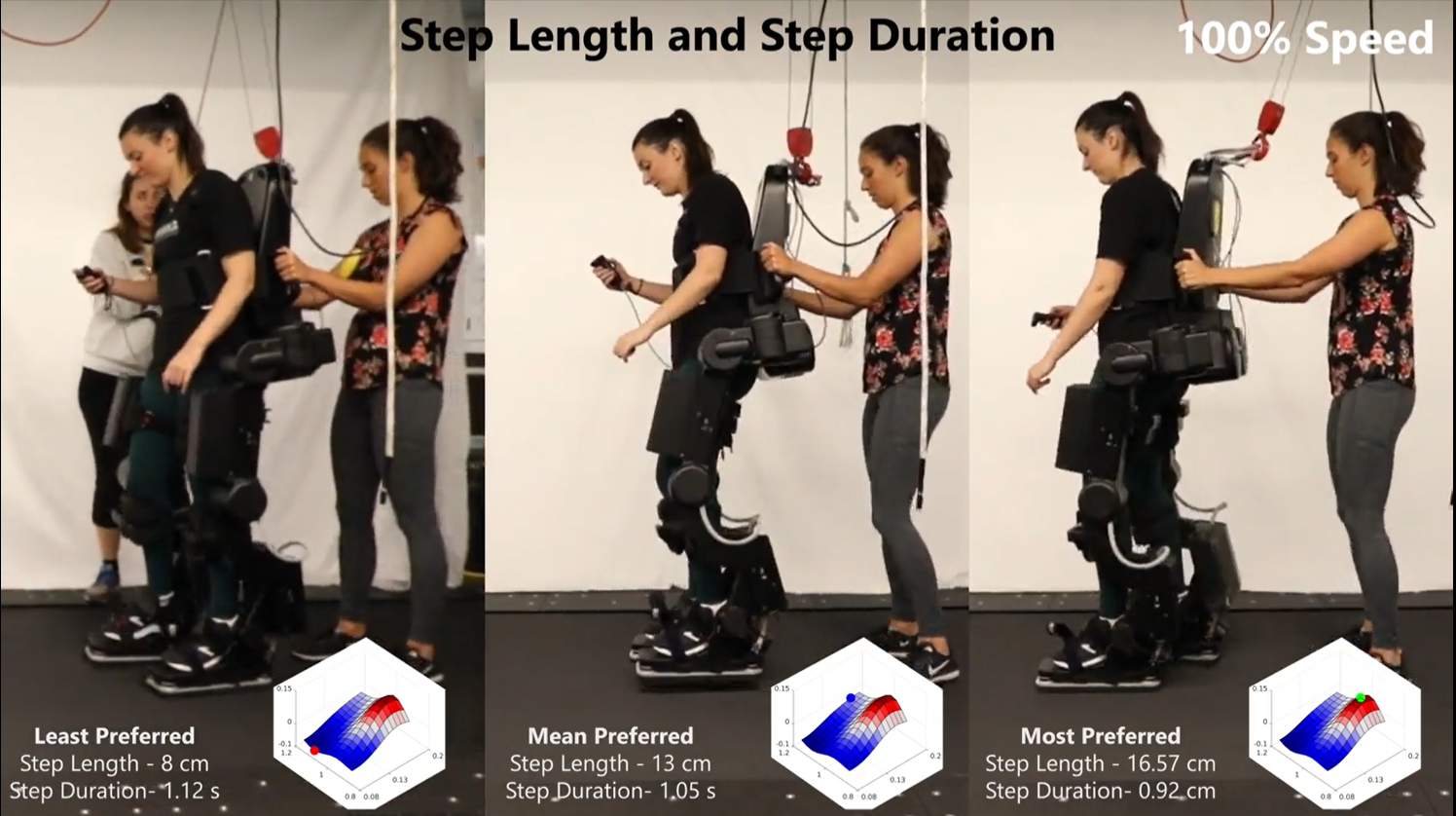
Rehab.
-
 Real-time feedback module for assistive gait training, improved proprioception, and fall preventionJan 2021
Real-time feedback module for assistive gait training, improved proprioception, and fall preventionJan 2021