Research thread aimed at evaluating the efficacy of lower-body assistive devices, including the clinical realization of user-preferred locomotion on robotic assistive devices.
Ultimately, the success of robotic behaviors can only be evaluated through implementation in the real world. For example, the success of lower-body assistive devices is evaluated through their translation to clinical settings. Thus, my research aims to evaluate the other threads of my research (bipedal locomotion and human-robot interaction) in real-world scenarios, with an emphasis on translating user-customized stable locomotion to clinical settings.
My research towards evaluating lower-body assistive devices thus far has included the analysis of a clinical study evaluating the efficiacy of the Atalante exoskeleton for 12 subjects with paraplegiao ver the course of 12 sessions. Additionally, my research has studied the effect of variable assistance on the metabolic rate of Atalante users.
A review of current state-of-the-art control methods for lower-limb powered prostheses
Rachel Gehlhar, Maegan Tucker, Aaron J Young, and 1 more author
@article{gehlhar2023review,title={A review of current state-of-the-art control methods for lower-limb powered prostheses},author={Gehlhar, Rachel and Tucker, Maegan and Young, Aaron J and Ames, Aaron D},journal={Annual Reviews in Control},year={2023},publisher={Elsevier},}
Real-time feedback module for assistive gait training, improved proprioception, and fall prevention
@article{kerdraon2021evaluation,title={Evaluation of safety and performance of the self balancing walking system Atalante in patients with complete motor spinal cord injury},author={Kerdraon, Jacques and Previnaire, Jean Gabriel and Tucker, Maegan and Coignard, Pauline and Allegre, Willy and Knappen, Emmanuel and Ames, Aaron},journal={Spinal Cord Series and Cases},volume={7},number={1},pages={1--8},year={2021},publisher={Nature Publishing Group},}
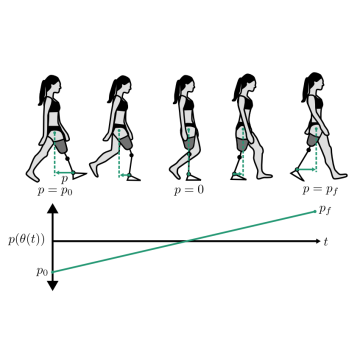
Towards variable assistance for lower body exoskeletons
Thomas Gurriet, Maegan Tucker, Alexis Duburcq, and 2 more authors
@article{gurriet2019towards,title={Towards variable assistance for lower body exoskeletons},author={Gurriet, Thomas and Tucker, Maegan and Duburcq, Alexis and Boeris, Guilhem and Ames, Aaron D},journal={IEEE Robotics and Automation Letters},volume={5},number={1},pages={266--273},year={2019},publisher={IEEE},}

 Real-time feedback module for assistive gait training, improved proprioception, and fall preventionJan 2021
Real-time feedback module for assistive gait training, improved proprioception, and fall preventionJan 2021