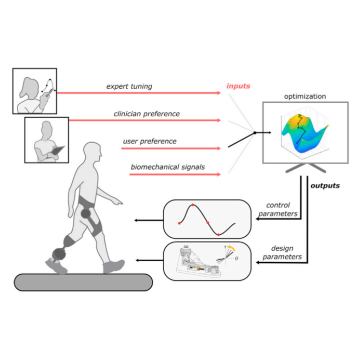
Research thread aimed at customizing robotic assistance by learning directly from human feedback.
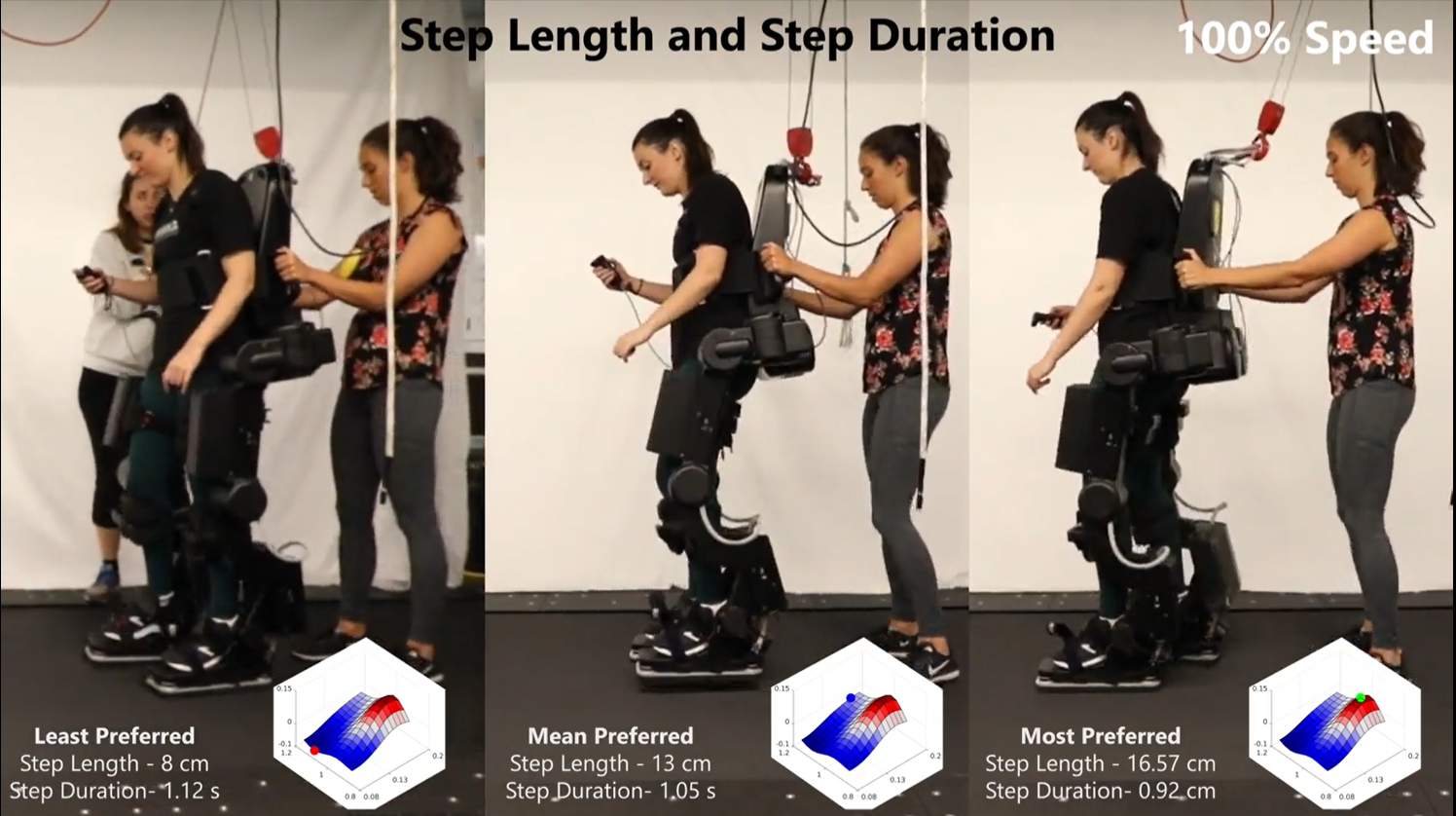
In order to realize complex robotic behaviors in the real world, human operators often have to manually tune various parameters ranging from low-level controller gains to high-level features. For example, the constraints of gait generation optimization problems are often manually tuned to obtain walking gaits that result in stable, robust, and visually-appealing bipedal locomotion. Also, for locomotion on lower-body exoskeletons, gait features such as step length and step duration are typically tuned until the resulting gait is comfortable for an individual user. Thus, to speed up this process of user-customization and enable faster realization of stable experimental locomotion, my research aims to develop a systematic method of customization by learning directly from subjective human feedback. Importantly, the resulting robotic behavior still enjoys theoretic guarantees since the learning merely shapes the control theoretic approaches from the field of bipedal locomotion. Lastly, the importance of leveraging only subjective human feedback is that humans have a natural inclination for what is good behavior in ways that are not able to be captured numerically.
To date, my research towards human-robot interaction has included developing human-in-the-loop preference-based learning algorithms for optimizing and characterizing user preference. These algorithms were demonstrated on the Atalante exoskeleton to optimize user comfort, on the AMBER-3M biped to obtain operator-preferred spring-foot and point-foot walking gaits directly in the gait generation framework, and on the Unitree A1 quadruped to achieve both safe and performant locomotion by tuning parameters of a control barrier function.
Leveraging user preference in the design and evaluation of lower-limb exoskeletons and prostheses
Kimberly A Ingraham, Maegan Tucker, Aaron D Ames, and 2 more authors
@article{ingraham2023leveraging,title={Leveraging user preference in the design and evaluation of lower-limb exoskeletons and prostheses},author={Ingraham, Kimberly A and Tucker, Maegan and Ames, Aaron D and Rouse, Elliott J and Shepherd, Max K},journal={Current Opinion in Biomedical Engineering},pages={100487},year={2023},publisher={Elsevier},}
Safety-Aware Preference-Based Learning for Safety-Critical Control
Ryan Cosner, Maegan Tucker, Andrew Taylor, and 7 more authors
In Learning for Dynamics and Control Conference 2022
@inproceedings{cosner2022safety,title={Safety-Aware Preference-Based Learning for Safety-Critical Control},author={Cosner, Ryan and Tucker, Maegan and Taylor, Andrew and Li, Kejun and Molnar, Tamas and Ubellacker, Wyatt and Alan, Anil and Orosz, G{\'a}bor and Yue, Yisong and Ames, Aaron},booktitle={Learning for Dynamics and Control Conference},pages={1020--1033},year={2022},organization={PMLR},}
ROIAL: Region of interest active learning for characterizing exoskeleton gait preference landscapes
Kejun Li, Maegan Tucker, Erdem Bıyık, and 6 more authors
In 2021 IEEE International Conference on Robotics and Automation (ICRA) 2021
@inproceedings{li2021roial,title={{ROIAL}: Region of interest active learning for characterizing exoskeleton gait preference landscapes},author={Li, Kejun and Tucker, Maegan and B{\i}y{\i}k, Erdem and Novoseller, Ellen and Burdick, Joel W and Sui, Yanan and Sadigh, Dorsa and Yue, Yisong and Ames, Aaron D},booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)},pages={3212--3218},year={2021},organization={IEEE},}
Preference-based learning for user-guided HZD gait generation on bipedal walking robots
Maegan Tucker, Noel Csomay-Shanklin, Wen-Loong Ma, and 1 more author
In 2021 IEEE International Conference on Robotics and Automation (ICRA) 2021
@inproceedings{tucker2021preference,title={Preference-based learning for user-guided {HZD} gait generation on bipedal walking robots},author={Tucker, Maegan and Csomay-Shanklin, Noel and Ma, Wen-Loong and Ames, Aaron D},booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)},pages={2804--2810},year={2021},organization={IEEE},}
Human preference-based learning for high-dimensional optimization of exoskeleton walking gaits
Maegan Tucker, Myra Cheng, Ellen Novoseller, and 4 more authors
In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
@inproceedings{tucker2020human,title={Human preference-based learning for high-dimensional optimization of exoskeleton walking gaits},author={Tucker, Maegan and Cheng, Myra and Novoseller, Ellen and Cheng, Richard and Yue, Yisong and Burdick, Joel W and Ames, Aaron D},booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},pages={3423--3430},year={2020},organization={IEEE},}
Preference-based learning for exoskeleton gait optimization
Maegan Tucker, Ellen Novoseller, Claudia Kann, and 4 more authors
In 2020 IEEE international conference on robotics and automation (ICRA) 2020
@inproceedings{tucker2020preference,title={Preference-based learning for exoskeleton gait optimization},author={Tucker, Maegan and Novoseller, Ellen and Kann, Claudia and Sui, Yanan and Yue, Yisong and Burdick, Joel W and Ames, Aaron D},booktitle={2020 IEEE international conference on robotics and automation (ICRA)},pages={2351--2357},year={2020},organization={IEEE},}