Research thread aimed at developing systematic methods of achieving complex robotic behaviors, including stable and robust bipedal locomotion, by leveraging tools from nonlinear control theory.
The field of nonlinear control has demonstrated success towards realizing complex robotic behaviors, including bipedal locomotion. Most importantly, nonlinear controllers account for the full system dynamics, allowing for theoretical guarantees. However, when a human is introduced into the system, our knowledge of the system dynamics decreases. Thus, a critical step to maintaining theoretic guarantees in cases when a human is part of the system, such as the case with lower-body assistive devices, is to better define the theoretical conditions underlying provably robust and stable locomotion. Once we better understand these notions, we can develop systematic methods of achieving robust and stable locomotion on a variety of bipedal platforms.
To date, my research towards bipedal locomotion has included systematically tuning controller gains for a CLF-QP on Cassie, incorporating musculoskeletal models into a gait genreation framework to achieve natural multi-contact walking on the AMPRO3 dual-actuated prosthesis, generating robust limit cycles for both the Atalante exoskeleton and the AMBER-3M biped by leveraging Saltation matrices, and developing methods for active ankle stabilization on Atalante.
Synthesizing Robust Walking Gaits via Discrete-Time Barrier Functions with Application to Multi-Contact Exoskeleton Locomotion
@inproceedings{tucker2023synthesizing,title={Synthesizing Robust Walking Gaits via Discrete-Time Barrier Functions with Application to Multi-Contact Exoskeleton Locomotion},author={Tucker, Maegan and Li, Kejun and Ames, Aaron D},booktitle={In Review},year={2023},}
Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero Dynamics
Adrian B Ghansah, Jeeseop Kim, Maegan Tucker, and 1 more author
In 2023 IEEE Conference on Decision and Control (CDC) 2023
@inproceedings{ghansah2023humanoid,title={Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero Dynamics},author={Ghansah, Adrian B and Kim, Jeeseop and Tucker, Maegan and Ames, Aaron D},booktitle={2023 IEEE Conference on Decision and Control (CDC)},year={2023},organization={IEEE},}
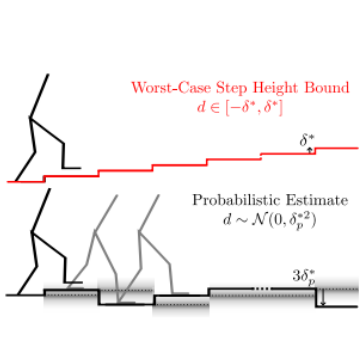
An input-to-state stability perspective on robust locomotion
@article{tucker2023input,title={An input-to-state stability perspective on robust locomotion},author={Tucker, Maegan and Ames, Aaron D},journal={IEEE Control Systems Letters},year={2023},publisher={IEEE},}
Input-to-State Stability in Probability
Preston Culbertson, Ryan K Cosner, Maegan Tucker, and 1 more author
In 2023 IEEE Conference on Decision and Control (CDC) 2023
@inproceedings{culbertson2023input,title={Input-to-State Stability in Probability},author={Culbertson, Preston and Cosner, Ryan K and Tucker, Maegan and Ames, Aaron D},booktitle={2023 IEEE Conference on Decision and Control (CDC)},year={2023},organization={IEEE},}
Learning controller gains on bipedal walking robots via user preferences
Noel Csomay-Shanklin, Maegan Tucker, Min Dai, and 2 more authors
In 2022 International Conference on Robotics and Automation (ICRA) 2022
@inproceedings{csomay2022learning,title={Learning controller gains on bipedal walking robots via user preferences},author={Csomay-Shanklin, Noel and Tucker, Maegan and Dai, Min and Reher, Jenna and Ames, Aaron D},booktitle={2022 International Conference on Robotics and Automation (ICRA)},pages={10405--10411},year={2022},organization={IEEE},}
Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics
Kejun Li, Maegan Tucker, Rachel Gehlhar, and 2 more authors
@article{li2022natural,title={Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics},author={Li, Kejun and Tucker, Maegan and Gehlhar, Rachel and Yue, Yisong and Ames, Aaron D},journal={IEEE Robotics and Automation Letters},volume={7},number={2},pages={4283--4290},year={2022},publisher={IEEE},}
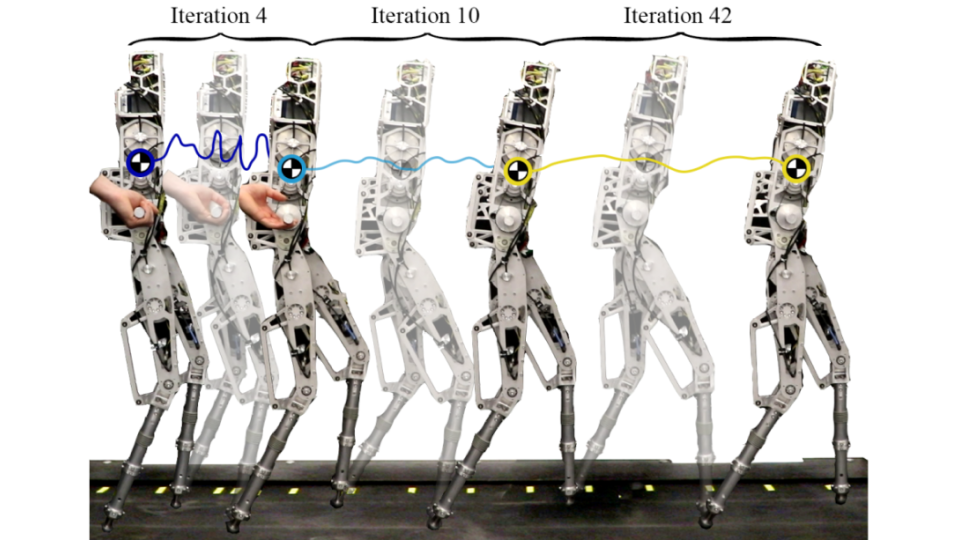
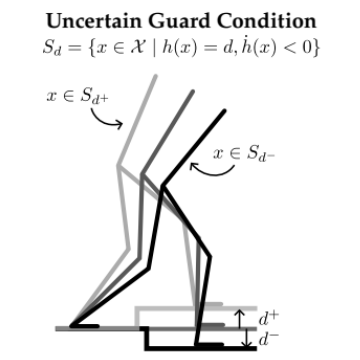
Robust Locomotion: Leveraging Saltation Matrices for Gait Optimization
Maegan Tucker, Noel Csomay-Shanklin, and Aaron D Ames
@article{gurriet2019stabilization,title={Stabilization of Exoskeletons through Active Ankle Compensation},author={Gurriet, Thomas and Tucker, Maegan and Kann, Claudia and Boeris, Guilhem and Ames, Aaron D},journal={arXiv preprint arXiv:1909.11848},year={2019},}